这篇文章是一个简明的,从头开始的RL公式推导笔记。这篇文章不追求符号的100%严谨,而主要为了降低读者对于数学公式的恐惧心理。
这篇笔记假设你理解 状态 State, 动作 Action和 奖励 Reward. 因为讲八股非常消磨精力。
目标
RL的目标是什么?
maxJ=Eτ[R]
τ 是轨迹, R 是该轨迹得到的奖励之和。这个定义简单易懂:我们需要在可达轨迹的分布下最大化能得到的奖励。 R 有多种表现形式,最简单的形式是折扣奖励 R=∑γtrt ,其中t是离初始状态的距离,r是从上一步转移到当前状态的奖励。此外,常用的 R 也可以被定义为价值函数 V ,这种情况下 E 的下标要变成初始状态 s0 ,即初态的稳态分布。很多教程喜欢在最重要的目标上面跳步而直接去看梯度,这导致我之前学起来的时候很难记住公式(策略梯度有很多个版本)。
梯度
机器学习广泛地运用梯度求极值。那么 J 的梯度该如何计算?我们以最简单的奖励形式来看一下。
J=Eτ[R]=∑p(s)⋅rs=∑∏p(sj∣si)⋅rs=∑∏π(si,a)⋅rs
π(s,a) 就是”策略”,它表示在s状态下执行动作a. 我们可以参数化 π ,即 π(s,a∣θ)
对上式求梯度(对 θ , 符号太麻烦了就省掉了)
∇J=∑∇∏π⋅r
由于 ∇f=∇logf⋅f , 右侧变成了
∇J=∑∇(log∏π⋅r)⋅p(s) . 注意r 与 θ 无关所以你放在梯度里面还是外面都行。这里的p就是那一坨连乘项。
这时,如果你再仔细看看这个表达式,就会惊喜地发现,它形如:
∑f⋅p 的形式,而这就是 Ep[f] !
所以 ∇J=Eτ[∇∑logπ⋅r] . 最外层的均值项可以通过 蒙特卡洛算法 消去。
这里使用的是简单的及时回报进行推导,但是很容易看出,只要r和theta无关,这个表达式是什么都无所谓,所以可以记一个通用公式:
∇J=Eτ[∑∇logπ⋅R]
sum是对整条轨迹上每一步求和,所以单步项就是log pi * R的梯度。
R的可选项如下所述,但绝不止这些。某些符号将在下一节介绍。
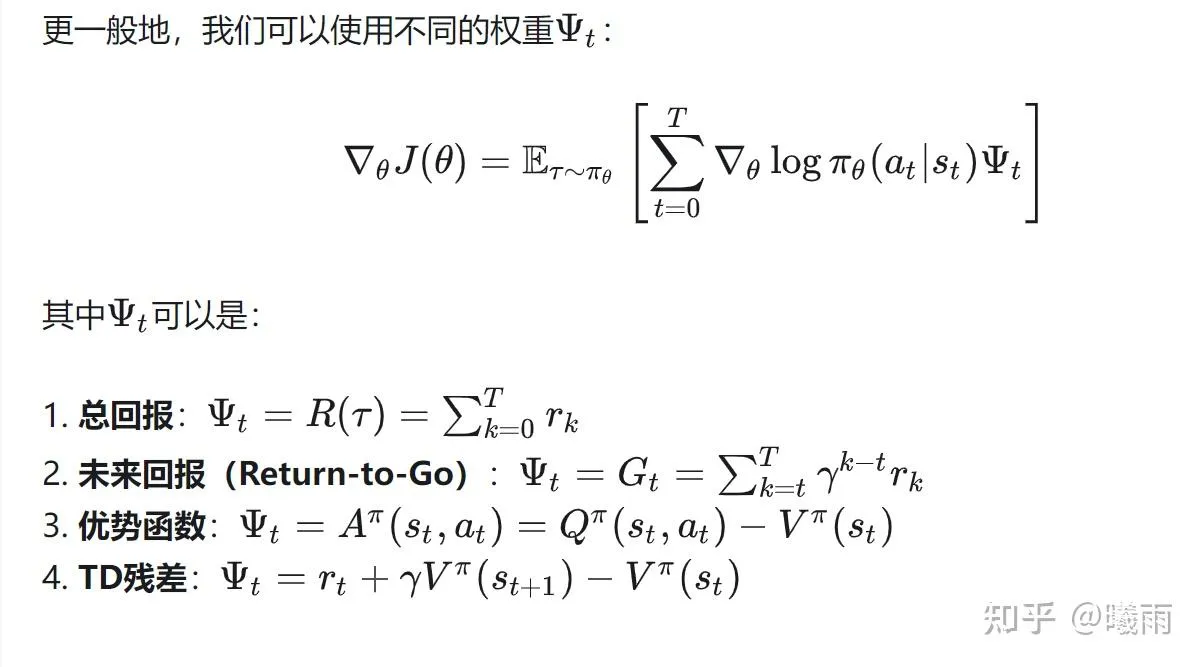
因果律
在这里,我们证明 R=∑0Trk 与 R=∑tTrk 最终得到的梯度估计是一致的。后者称为 return-to-go (期望回报)。
换句话说,我们希望证明
E[∑∇logπt⋅∑0t−1rk]=0
注意到在 t 给定的时候,后面这个奖励项是个定值,可以被提出来,于是这个式子可以化作
E[∑α⋅∇logπt]=∑α⋅E[∇logπt]=0
最后一步被称为EGLP(Expected Grad-Log-Prob Lemma)引理。其证明很简单,因为 ∫∇logp⋅pdx=∫∇pdx=∇1=0
值得一提的是,如果我们考虑折扣因子 γ 的情况下,总奖励为 R=∑kγkrk , return-to-go为 Gt=∑kγk−trk
return-to-go偏移了 γ−t 。很多教程在这个地方跳步,或者和 基线 的数学等价混为一谈,说这个也是等价的。但其实,这个和原始的总折扣回报 确实是不一样的 ,(某些教程老说数学上等价给我绕晕了)。直觉上,这体现为对较近奖励的增强。需要注意的是总奖励和return-to-go只是最开始的那个 R(τ) 的不同形式,它们不一定非要数学上一样,只要make sense, 也是可行的。实际上到后面介绍Q, V的时候会发现这两个形式在概率意义上确确实实差了一个常数项(即省去的 ∑η )(这一块儿总之稀里糊涂的,蹲评论区大佬)
基线
由上面的证明过程不难看出,只要你对 R 加上一个和未来奖励无关的项 b ,使得 E[b∇logπt] 计算的时候, b 是个定值可以被提出来,那么就不会影响到最终的结果。
因此策略梯度也常被写成
∇J=Eτ[∑∇logπ⋅(R−b)]
恰当的 b 有助于降低方差。举个例子:游戏过程中agent可以一直拿到70分,80分,如果不加以区分,就会导致鼓励任意行为(只是鼓励的程度不同);而如果设置b=75,就区分了两者,更有效地进行更新。
单步
在上面的叙述中更新过程都是针对整个episode τ 而言的。有时候这很麻烦,因为执行一整局很耗时。
幸运的是,
∇J=Eτ[∑∇logπ⋅R]=∑τ∼f(τ)p(τ)⋅∑[logπ⋅R]=∑(s0,a0,⋯)∑∼
(因为公式太长了后面写得省略了一点)
我们可以从展开式中看出,这个式子是有可能改写成 (s,a) 下标求和的。唯一的问题是当前表达形式仍然是以episode的 (s0,a0,s1⋯) 这样的状态-动作序列遍历的。如果我们需要将其拆出 (s,a) 下标遍历,就需要指定 episode的长度,即固定一个步数进行求和。这将十分复杂。
具体的推导过程可以参考
三、PG/VPG/Reinforce 策略梯度方法
最终的表达式都是
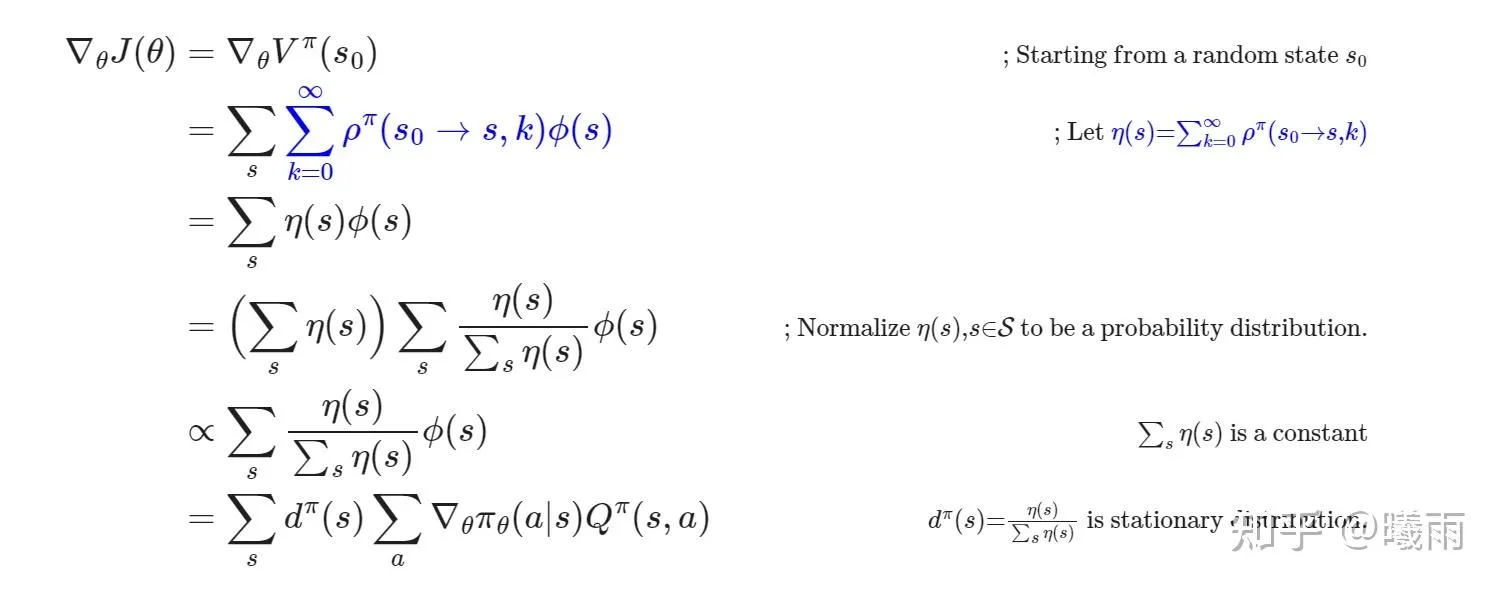
前面乘了一个 η 求和项的形式。这个是访问当前状态的次数,而 ρ 就是我上面提到的那个给定步长的转移概率。而 η/∑η 就是单个状态的稳态分布。
这里省掉了sum eta,就是之前我提到的return-to-go和整个episode回报的差异点。本质上来说,return-to-go是对Q的估计而R是对episode回报的估计,两者差了这么一个访问系数。
得到稳态分布之后就可以写成期望形式啦。
注意图片中已经直接使用了 Q ,我们将在之后介绍它。
Q, V
老实讲,当我从头一步一个脚印学RL的时候我才发现, 根本就见不着Q, V 这些符号的影子!我们只需要知道奖励和策略就足够完成推导了。由此可见,这些符号的引入并不是自然的。
我们先从较为容易介绍的 V(s) 说起。这个函数定义了当前状态下,遵循当前策略(注意和策略有关系),预期得到的总回报。换句话说
V(s)=E[R(τ)∣s0=s]
如果你足够细心,就会发现这个定义等于 return-to-go的期望。
而 Q(s,a) 被定义为当前状态下,采取动作 a 预期得到的总回报。即
Q(s,a)=E[R(τ)∣s0=s,a0=a]
很显然,假设 (s,a) 转移到了 s′ ,那么 Q(s,a)=γP(s→s′∣s,a)⋅V(s′)+R(s,a)
反过来 V=Ea[Q(s,a)]
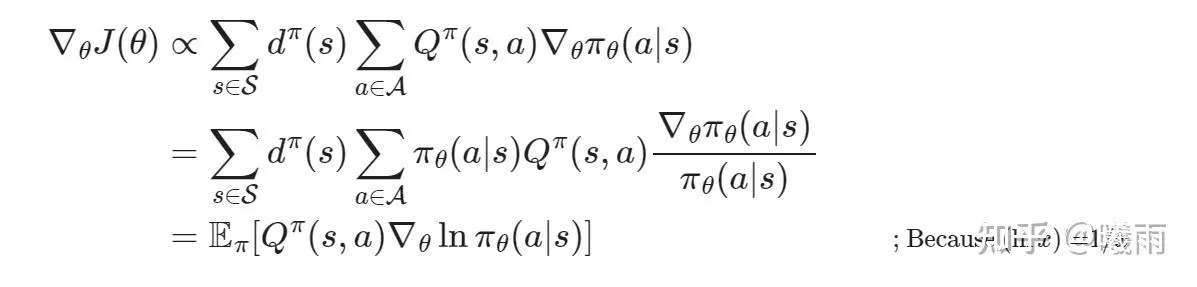
使用 Q函数 表述的策略梯度定理如下:

与之前同理,我们可以对Q减去一个基线 b 来优化方差。在这里,最优的基线为 V 。
优势函数就被顺势定义为 A=Q−V
在实际计算过程中,我们不可能知道真实的 Q,V ,因为这要求无限步执行当前策略。所以,通常使用另外的网络进行估计。如何估计就造就了多种多样的算法。
to be continued…